Final elements such as safety shutdown valves, emergency isolation valves, blowdown valves, etc., in safety instrumented functions (SIFs) are equipped with various accessories such as digital valve controllers, solenoid valves (SOV), and volume boosters, to name a few.
 Emerson’s Riyaz Ali shared a draft of a paper he is developing about the different approaches with respect to smart positioners and solenoid valves in process safety applications. He noted that the IEC 61511 global safety standard defines a safety instrumented system (SIS) as an instrumented system used to implement one or more SIFs.
Emerson’s Riyaz Ali shared a draft of a paper he is developing about the different approaches with respect to smart positioners and solenoid valves in process safety applications. He noted that the IEC 61511 global safety standard defines a safety instrumented system (SIS) as an instrumented system used to implement one or more SIFs.
Final elements used in safety applications typically remain stationary until a safety demand arises which requests them to go to their safe state—either fully open or fully closed. Digital valve controllers, such as the DVC6200 SIS, have been certified by 3rd party as standalone, suitable for use in safety applications up SIL 3 SIF loops.
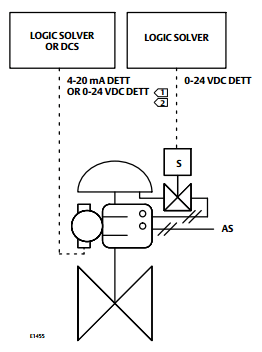 Riyaz shared that many process manufacturers still opt to use solenoid valves (SOVs) pneumatically mounted in series with the digital valve controllers. This approach provides a redundant pneumatic path in case of a safety demand, where either device will drive the emergency shutdown (ESD) valve (often tagged ZV) to the fail-safe position should the primary ESD device (solenoid valve) fail to function. In this case, the digital valve controller can drive the valve to a safe state.
Riyaz shared that many process manufacturers still opt to use solenoid valves (SOVs) pneumatically mounted in series with the digital valve controllers. This approach provides a redundant pneumatic path in case of a safety demand, where either device will drive the emergency shutdown (ESD) valve (often tagged ZV) to the fail-safe position should the primary ESD device (solenoid valve) fail to function. In this case, the digital valve controller can drive the valve to a safe state.
Also, as we highlighted in an earlier post, Checking Your Safety Solenoid Valves, the digital valve controller can sense and capture the data for the momentary pressure blip across the solenoid valve to verify its health without causing the safety valve to move.
Riyaz explained that having a solenoid valve integral with a smart positioner would not meet redundancy requirements. This arrangement will affect the PFDavg calculations as per ISA TR84.00.02-2002 part 2. An integral SOV provides a one-out-of-one (1oo1) arrangement where an external SOV provides a one-out-of-two (1oo2) approach in the pneumatic path. The 1oo2 approach provides improved PFDavg over a 1oo1 single-box approach.
If the SOV is external in the pneumatic line then the digital valve controller can monitor its health and its test results can be sent directly to the control system on the plunger movement within the SOV during the test. Similar tests can be done if the SOV is integral to the digital valve controller but there are neither test reports generated nor health status of internal SOV available at control system level.
Riyaz believes that an external solenoid valve pneumatically in series is a preferred option due to redundancy in hardware to drive the valve to safe state. Per IEC 61508, a smart SOV (integral microprocessor based smart positioner + integral SOV) will be classified as Type B (IEC 61508 part 2 – clause 7.4.3.1.3) device. This means the failure mode of at least one constituent component is not well defined; or b) the behavior of the subsystem under fault conditions cannot be completely determined; or there is insufficient dependable failure data from field experience to support claims for rates of failure for detected and undetected dangerous failures.
An SOV connected in externally in series would be a Type A (IEC 61508 part 2 – clause 7.4.3.1.2) device. This means the failure modes of all constituent components are well defined; and the behavior of the subsystem under fault conditions can be completely determined, and there is sufficient dependable failure data from field experience to show that the claimed rates of failure for detected and undetected dangerous failures are met. Going from a Type A to Type B device will have an impact on safety reliability and evaluation will be required for SIF loop for PFDavg calculation.
To improve MTTFs (Mean Time to Fail Spuriously), a smart positioner can use a reverse-type relay, which will not contribute to MTTFs. In the case of an electrical signal failure or input current signal, the smart positioner will not cause spurious trip. This means that two devices connected pneumatically in series will have MTTFs for a single device (SOV Type A device only). Smart positioner and SOV mounted externally pneumatically in series support high safety reliability and plant availability.
A smart positioner with an integral SOV will have high air consumption (67.8 scfh) for large orifice compare to a smart positioner with a similarly sized external SOV, which will have a low-bleed relay (2.1 scfh). This is because external SOVs will NOT consume any air during normal operation.
Riyaz closed suggesting that for SIS applications to keep accessories such as volume boosters or solenoid valves (if required) as an external devices rather than integral. This subject is still open and future technology developments may warrant another look at the pros and cons of integral vs. external final element accessories in process safety applications.
Update: The factors converting standard cubic feet per hour to cubic meters per hour were incorrect and have been removed.
