Automation Engineers is one of the dynamic LinkedIn groups for automation professionals. A recent question was posed:
Which is most effective ethernet or profinet
I wanted to share Emerson’s Jonas Berge‘s response [I’ve inserted hyperlinks where he has URLs and added some as references for items he cites]:
It is important to realize that there are two distinct classes of “fieldbus” being “H1” fieldbus and “H2” fieldbus.
Bob is right in so far as that Ethernet is making inroads taking the place of the “H2 fieldbus” class of protocols. However, Ethernet is not taking the place of the “H1 fieldbus” class of protocols. So what’s the difference?
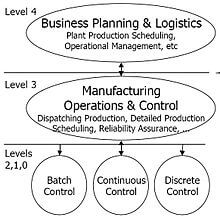
Source: Wikipedia, PERA Reference model: Decision-making and control hierarchy
The H2 fieldbus category of protocols is used at level 1-1/2 of the Purdue reference model to connect remote-I/O, PLCs, MCC, variable speed drives, motor starters, and wireless gateways to the DCS. Options include e.g. DeviceNet, Modbus/RTU, and PROFIBUS-DP. Now Ethernet-based EtherNet/IP, Modbus/TCP, PROFINET are growing as they sometimes are being used in applications which previously used H2 fieldbus.
The H1 fieldbus category of protocols is used at the lower level 1 of the Purdue model to connect the underlying sensors/transmitters and positioners/actuators/valves to the DCS. Options include e.g. FOUNDATION fieldbus H1, PROFIBUS-PA, DeviceNet, ASI, IO-link, and CompoNet. Ethernet is not being used at this low level. Indeed H1 fieldbus is taking the place of traditionally hardwired 4-20 mA and on/off signals for sensors and actuators. Ethernet is not suitable to take the place of 4-20 mA and on/off signals.
So Ethernet may become a dominant network technology at level 1-1/2 but since Ethernet is not a good fit for level 1 of the Purdue model we don’t see Ethernet in sensors and actuators out in the field. For example, pressure, temperature, level, vortex flow, interface level transmitter or control valve positioner or on/off valve etc. are not available with Ethernet.
That is, Ethernet and H1 fieldbus complement each other in the control system architecture much like Ethernet and USB complement each other on a computer, and also the same way as Wi-Fi and Bluetooth® wireless technology complement each other – because one size does not fit all. One such H1 fieldbus is FOUNDATION fieldbus. You can learn about the unique characteristics required at the sensor/actuator level.
In my personal opinion, the industry can’t move forward using 4-20 mA and on/off signals. Modern plants need many more sensors than plants of the past to feed the “big data” paradigm but also for real-time data for equipment reliability, energy conservation, and improved HS&E; maybe 2X or 3X – just like in a modern car vs. a car of the past. Using 4-20 mA and on/off signals for all these sensors is just impractical. We need digital communication from the very “first meter”. Just like a modern car has digital communication network for all the sensors (in fact multiple networks for different functions); so should a plant have digital sensor networks too: H1 fieldbus or wireless
H1 fieldbus will be used and this will generate more data from the field instrument at level 1 which in turn will drive increased use of Ethernet at the higher level networks at level 1-1/2 and above.
Examples of how H1 fieldbus truly complements Ethernet can be seen in how IO-Link and CompoNet were created after PROFINET and EtherNet/IP respectively to support the architecture at level 1.
I asked Jonas if he had additional thoughts to share for this blog post and here’s what he added:
In addition to more sensors around the plant, more and more signals are being used in each intelligent device. For instance, Coriolis flowmeters produce a primary measurement (mass flow) which is usually all that was used in the past due to the high cost or hardwiring and system I/O. But, these devices also produce additional variables (such as density and volumetric flow) which often were not wired up in the past but which modern plants now want to use to make the most of the intelligence in the device to benefit the plant.
Similarly, an electric actuator or motor operated valve (MOV) in the past was often wired up with only 6 out of perhaps 16 control and feedback signals in order to reduce I/O count, but to unleash full capability of the MOV more signals are now being used to benefit the process.
On the same note, on/off valves were not digitally integrated in the past and therefore had no diagnostics. Today there are intelligent two-wire on/off valves that provides diagnostics similar to control valves, and this diagnostics can be digitally integrated into the same intelligent device management (IDM) software part of the asset management system as the diagnostics from control valves and intelligent transmitters. Topworx Valvetop DXP and FieldQ are two good examples.
That is, lots more real-time signals, lots more data, drives the need for digital networking, and faster networking at the higher levels.
If you have thoughts on this or other comments in the thread, visit the Automation Engineers LinkedIn group.
