Wireless standards for instrumentation go back to September 2007 when the HART Communications Foundation (now FieldComm Group) announced the official release of the HART 7 specification. This specification included the WirelessHART protocol.
As we have chronicled in many posts in the Wireless category here on the blog, this technology has opened up many new opportunities for process manufacturers and producers to improve overall performance, reliability and safe operations.


 As this communications technology continues to prove itself and advance, control applications are emerging.
As this communications technology continues to prove itself and advance, control applications are emerging.
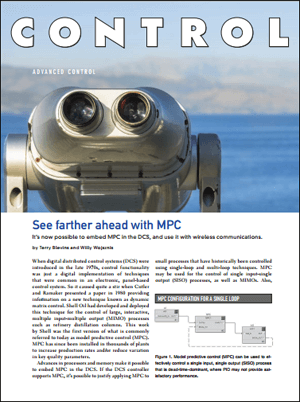
In a Control magazine article, See farther ahead with MPC, Emerson’s Terry Blevins and Willy Wojsznis describe how it is now possible to incorporate wireless devices in model predictive control (MPC) applications.
Model predictive controllers used to be layered supervisory applications that ran above the distributed control system (DCS). As microprocessor technology advanced, this advanced process control technology could be embedded into the DCS.
If the DCS controller supports MPC, it’s possible to justify applying MPC to small processes that have historically been controlled using single-loop and multi-loop techniques. MPC may be used for the control of single input-single output (SISO) processes, as well as MIMOs [multiple inputs-multiple outputs].
Terry and Willy give an example of an MPC SISO application:
MPC can be used to effectively control a SISO process that is “dead-time dominant” (process dead time is equal to or greater than the process time constant) and where PID may not provide satisfactory performance…
Interactions between control loops often require detuning the proportional-integral-derivative (PID) algorithms. With MPC:
…the interaction of the manipulated inputs and controlled outputs may be addressed by one MPC block… any interactions are automatically compensated for by the MPC block. Thus, each controlled parameter many be independently maintained at setpoint without interaction.
The challenge with incorporating wireless measurements into MPC algorithms is that the updates come from the wireless devices on an irregular basis—based on a process variable (PV) change exceeding a configured threshold. Communications is optimized in this way to save on battery life. Terry and Willy explain how a modified MPC algorithm addresses this:
To enable wireless MPC operation, wireless measurement status may be used to indicate whether a new value has been communicated or the last communicated value is being held. It follows that MPC will work with wireless measurements, provided the wireless measurements status is updated in this manner. If a wireless measurement status does not change as required for MPC wireless operation, then in most cases the required status indication can be created using tools provided by the DCS.
…
Wireless MPC uses its own internal model for simulating process parameter values in periods when there is no new measurement transmitted. When a new measurement is available, the model prediction and the simulated parameter value are updated.
 The authors reference Chapter 5 from their book, Wireless Control Foundation – Continuous and Discrete Control for the Process Industry where you can get more information on control using wireless transmitters.
The authors reference Chapter 5 from their book, Wireless Control Foundation – Continuous and Discrete Control for the Process Industry where you can get more information on control using wireless transmitters.
You’ll want to read the article to see their example of a divided wall column controlled with wireless MPC that was commissioned in March 2015 for a better understanding of how this works.
You can connect and interact with other advanced control and wireless experts in the DeltaV and Wireless groups in the Emerson Exchange 365 community.
