The safety valve within a safety instrumented function (SIF) must be tested regularly to help assure proper operation in the event of a safety demand. Operators usually perform an offline full stroke test during a scheduled shutdown because of the impact of this test on the process. But when a SIF (a.k.a. safety loop) requires more frequent testing, users can perform a partial stroke test (PST), per the global IEC 61511 safety standard, while the valve is online.
During a PST, the valve is stroked a portion of its total travel to verify it is not stuck and to uncover other dangerous failures. The solenoid valve (SOV) can also be tested by briefly removing power to the solenoid valve and examining the resulting pressure drop across the solenoid valve. These tests help to extend the interval between full-stroke tests.
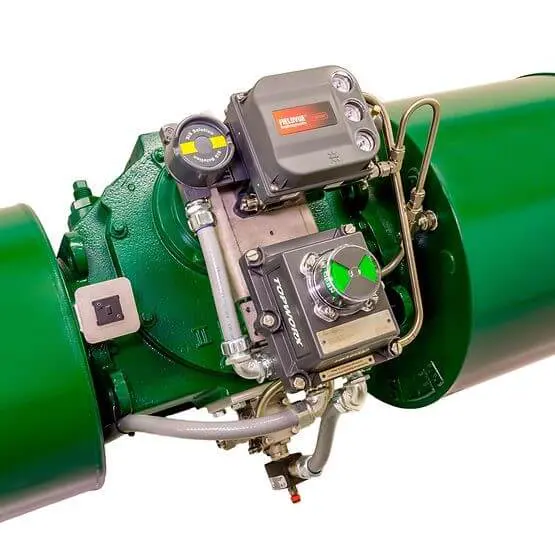
Digital valve controllers, such as the Fisher FIELDVUE DVC6200 SIS, perform these tests on demand or scheduled through applications such as AMS Device Manager & ValveLink software or control systems such as the DeltaV distributed control system.
I caught up with Emerson’s Riyaz Ali. He noted that the digital valve control with PST capabilities for safety applications has been proven in use for years and years. Digital valve controller technology itself has been available for a quarter of a century. Some newer solutions have begun to emerge where the integration of PST control electronics into a single unit with the termination housing of a solenoid valve.
Riyaz highlighted some differences in these approaches. A digital valve controller-based PST device has a built-in travel sensor, pressure sensor and velocity sensor to provide comprehensive diagnostics around the performance of the valve. The integrated PST electronics with SOV-based technology (Smart SOV) requires at least an external travel sensor and pressure sensor along with its associated electrical wiring and pneumatic tubing to get similar diagnostics.
The external travel sensor requires power supply from the control system to operate and needs to be properly and accurately mounted and aligned. Similarly, the external pressure sensor requires an additional mechanical tapping in the pneumatic output line to actuator. This is built-in for a digital valve controller-based solution. These integral travel and pressure sensors also cut down the response lag, avoiding a delayed action.
The Smart SOV approach requires different models, depending upon the process line connection size. The digital valve controller approach requires only a simple and economic external SOV to stock. The temperature range of operation for a digital valve controller is -40 to 85 degC. This range is much greater than for the Smart SOV approach.
Digital valve controllers continuously monitor the health of internal components helping to assure its availability when needed. This continuous monitoring is available through the ValveLink software with Network Scan for Critical Alerts. For the Smart SOV approach, component tests are done by interruption of power (24VDC – DO) to the SOV.
The digital valve controller is a smart positioner plus an external SOV pneumatically in series. The SOV is considered as a Type A simple device improving its reliability numbers. Smart SOVs are classified as Type B devices as per IEC 61508 part 2 table 3. Type A and Type B are defined in IEC61508 part 2.
Another consideration is common cause failure. Smart positioners for SIS with external SOVs pneumatically in series provides redundancy in case of a safety demand. These allow each component to take valve to safe state, which provides higher levels of safety and reliability. This approach is in line with IEC 61511 part 3, clause 3.4.
Checking the health of an SOV is simplified with a digital valve controller mounted pneumatically in series. SOV health monitoring via a pressure blip can be seen on ValveLink. With a Smart SOV approach, there are no visual results of an SOV’s health.
A digital valve controller with the external SOV pneumatically in series will have higher spurious trip rate. To improve MTTFs (Mean Time to Fail Spurious) presently these smart positioners can use a reverse type relay, which will NOT contribute to MTTFs. In case of any electrical signal failure or input current signal to the smart positioner, these will NOT cause a spurious trip. Hence, two devices pneumatically in series will have MTTFs for a single device (SOV Type A device only). A digital valve controller and external SOV, pneumatically in series, will be an ideal solution from a safety, reliability and plant availability standpoint.
Digital valve controllers have rich diagnostics including valve signature capabilities, which enables a virtual X-ray of valve internals. These diagnostics help to avoid the need to pull the valve out of line for inspection. Valve signatures provide a foot print of the valve body, actuator and accessories mounted, saving time and money during a plant turnaround—to establish a base line, if the valve needs to be taken out of line for maintenance.
Some of the digital valve controller diagnostics include valve signature, dynamic error, drive signal, data analyzed and displayed on actuator spring rate, bench set, potential packing problems, seat load and torque requirements, compare and overlay capabilities allows to check previous valve curve.
From an integration standpoint, a digital valve controller allows easy integration to any control system with broad HART capabilities for easy display on the operators’ HMIs. A Smart SOV has very limited integration capabilities.
Riyaz highlighted a few other capabilities in digital valve controllers not available in Smart SOVs including built-in protection of inadvertently moving valve to more than 30% travel, ramping with different speed to suit process, pause times to eliminate overshoot at end of travel, scheduling partial stroke test for specific date and time, having valve stuck alerts, updating electronics while connected, and checking shaft integrity.
Finally, a digital valve controller has a built-in position transmitter that is completely independent from the positioner function. In case of an electrical signal failure, the position transmitter signal is still available. A Smart SOV requires an external position transmitter, which adds to the hardware and installation & mounting costs.
Visit the Digital Valve Controllers section on Emerson.com for more on the capabilities inherent in these devices. You can also connect and interact with other digital valve controller/smart positioner experts in the Valves, Actuators & Regulators group in the Emerson Exchange 365 community.