 The subject of process dynamics can get quite involved and cause many to shy away from it. Emerson’s Felipe Fakir, a systems engineer based in Brazil, has written a whitepaper, Process Characterization, to make the topic more approachable—at least in how to identify simple process dynamics.
The subject of process dynamics can get quite involved and cause many to shy away from it. Emerson’s Felipe Fakir, a systems engineer based in Brazil, has written a whitepaper, Process Characterization, to make the topic more approachable—at least in how to identify simple process dynamics.
He opens introducing the process variables used in a control system:
- Manipulated variable – Process input that can be adjusted to keep a control variable at a specific value
- Disturbance – Measured process input that can’t be adjusted, it changes the process response
- Control variable – Process response that must be kept at a constant value
- Restriction – Process output that must be kept within limits, restricting the manipulated variables adjustments

Felipe describes the process of running tests to determine the type of process. Some very common ones include first-order process with deadtime, integrating process, and inverse process.
Process with Dead Time
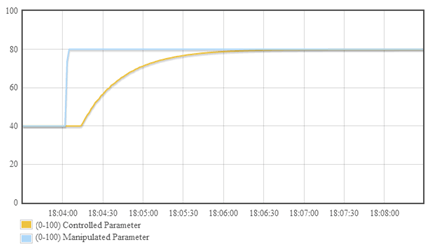
He notes that a first-order process is stable because once the setpoint step change is applied, the process variable stabilizes at the new value.
Integrating processes change at the integral rate over time. A level in a tank is an example of an integrating process.
An inverse process is one where the initial response to a setpoint change is in the opposite direction before moving back in the same direction as the change. Bottom heating in a distillation column is an example of an inverse process response.
Finding Time Constant and Process Gain
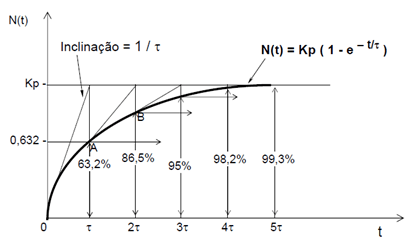
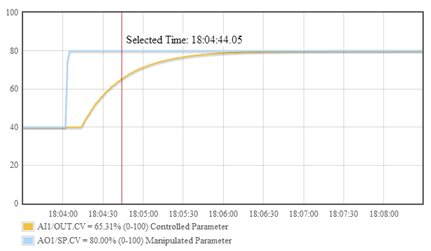
Felipe describes the steps in finding process constants in a first-order example. The time constant (Ƭ) is found at the process variable’s 63.2% climb to the setpoint change. The mathematics behind this value is found in the Time Constant Wikipedia entry.
Process Time Constant
The process gain (Kp) is defined as the steady state change in the measured process variable divided by the steady state change in the output.
See my post, How to Tune Self-Regulating Control Loops, for how to use the parameters in PID loop tuning using the Lambda tuning rules.
