Earlier this week, I shared a podcast with James Beall, who as a long-time Control Performance Consultant shared some of his thoughts on common control performance issues and ways to address them. James is quite generous in sharing his expertise at professional and industry events such as ISA and AIChE.
Today, I’ll recap one of his AIChE Spring21+17th GCPS presentations he co-presented with CMiD Solutions’ Mark Darby. The presentation, An Activity Report on the Newly Formed ISA 5.9 Subcommittee on the PID Algorithm, described this initiative. Remarkably, the International Society of Automation (ISA) had no standards related to the Proportional, Integral, Derivative (PID) controller, a long-standing control method used in the manufacturing and production industries.
The initiative by Emerson’s Greg McMillan, Industry Expert and ISA Fellow, started ISA subcommittee 5.9 on the PID function in 2019. Greg recruited control experts from industry and academia for this subcommittee. James and Mark noted that this effort is a technical reference and not a standard—meaning “shall” will not be found in the finished work. This technical reference (TR) will explain the many PID options such as form and structure, etc. It will also highlight some common digital implementation options—positional, velocity, incremental to name a few.
There will also be guidance on loop performance, simulation and other modern innovations. They noted that a 123-page draft of all the technical reference subsections have been assembled and ready for review. Here is the current outline of the 5.9 TR:
- Scope
- Definitions
-
PID Algorithm
- History
- Form and Structure
- Position Implementation
- Velocity Implementation
- Integral via Positive Feedback
- Integral Windup Prevention
- Integral Tracking
- Output Tracking
- With Feedforward
- Tuning conversion
- External Reset Feedback
- PID Performance
- PID Signals
- Annex A – Signal Characterization
- Annex B – Dynamic Simulation
- Annex C – Valve Positioners
- Annex D – Dead Time Compensators
- Annex E – Enhanced PID
What this subcommittee has learned so far is that suppliers of PID control technology use different terminology for their PID features which can be unclear and even contradictory vs. other suppliers, mainly because there is no standard technical reference. Also, even with many good PID features, customization may be required. Some features such as External Reset Feedback can be useful but not all controllers have it.
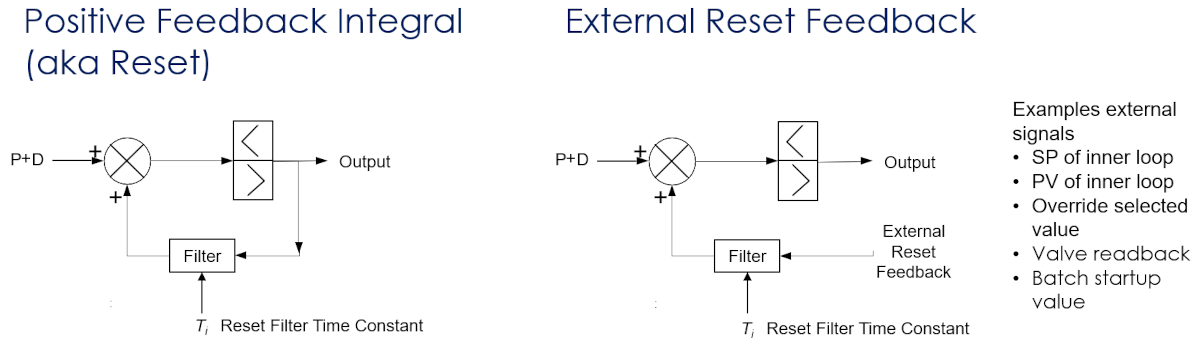
They shared an example of a high-pressure relief application where making sure the valve does not start opening before the process variable (PV) is greater than the setpoint (SP). It’s important to ensure that override applications work properly when the dynamics/tuning are significantly different. Having a PV filter option is important for specific control objectives.
Other examples they shared in their presentation included signal filtering, signal characterization, and PID performance and the effects of the PID algorithms, structures and tuning. The technical recommendations will also include options for setpoint response to handle disturbances, explanation of valve nonlinearities such as dead band, resolution, and slow step response time, as well as the tuning conversions for the different forms of PID control—Standard, Series and Parallel.
To learn more about these efforts, connect with James through email or LinkedIn with the links provided in the sidebar. You can also get help for your production performance improvements by visiting the Production Performance Consulting section on Emerson.com.


