The history of model predictive control (MPC) dates back to the early 1970s invented at Shell Oil and was known as Dynamic Matrix Control. MPC was designed at that time to solve largescale control challenges. As technology advanced, this technology could be more widely applied on smaller-scale challenges.
 At this past 2019 AIChE Spring Meeting, Emerson’s James Beall presented Unique Applications for Embedded Model Predictive Control Technology. In his presentation, he shared several examples of smaller applications ideally suited for MPC-based control strategies.
At this past 2019 AIChE Spring Meeting, Emerson’s James Beall presented Unique Applications for Embedded Model Predictive Control Technology. In his presentation, he shared several examples of smaller applications ideally suited for MPC-based control strategies.
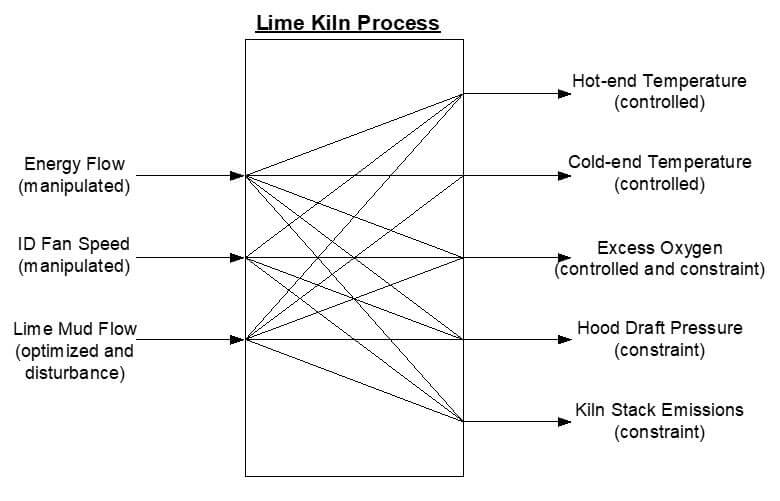
James opened by defining what MPC is. It uses the past to predict the future by using modeled relationships among the process inputs and outputs. It is multi-variable in the numbers of inputs and outputs. These variables can be dependent on and independent of one another as he showed in this Lime Kiln process example.
As explained on the MPC Wikipedia page:
In a chemical process, independent variables that can be adjusted by the controller are often either the setpoints of regulatory PID controllers (pressure, flow, temperature, etc.) or the final control element (valves, dampers, etc.). Independent variables that cannot be adjusted by the controller are used as disturbances. Dependent variables in these processes are other measurements that represent either control objectives or process constraints.
What separates embedded MPC, such as DeltaV Predict and PredictPro, is that the MPC algorithm runs in the DCS controllers/stations, can run redundantly and fast with execution times of 1 second, have an integrated operator user interface, is configured through standard configuration tools, provides automated step testing and model identification, is available off-line for simulation and testing, and is designed to be implemented by the plant control engineers.
Unlike traditional larger MPC application which are layered above the control system, embedded MPC has no extra databases or database synchronization issues, no watchdog timers, no fail/shed logic design requirements, and no custom DCS programming or user interface programming.
Both traditional and embedded MPC have their use depending on the size of the application—although there is overlap on medium-sized applications.
James shared 5 examples of unique applications where embedded MPC is a great fit: “big valve, little valve”, dead-time dominant single in-single out (SISO), feed forward and override, waste heat steam generator, and waste heat recovery—steam export.
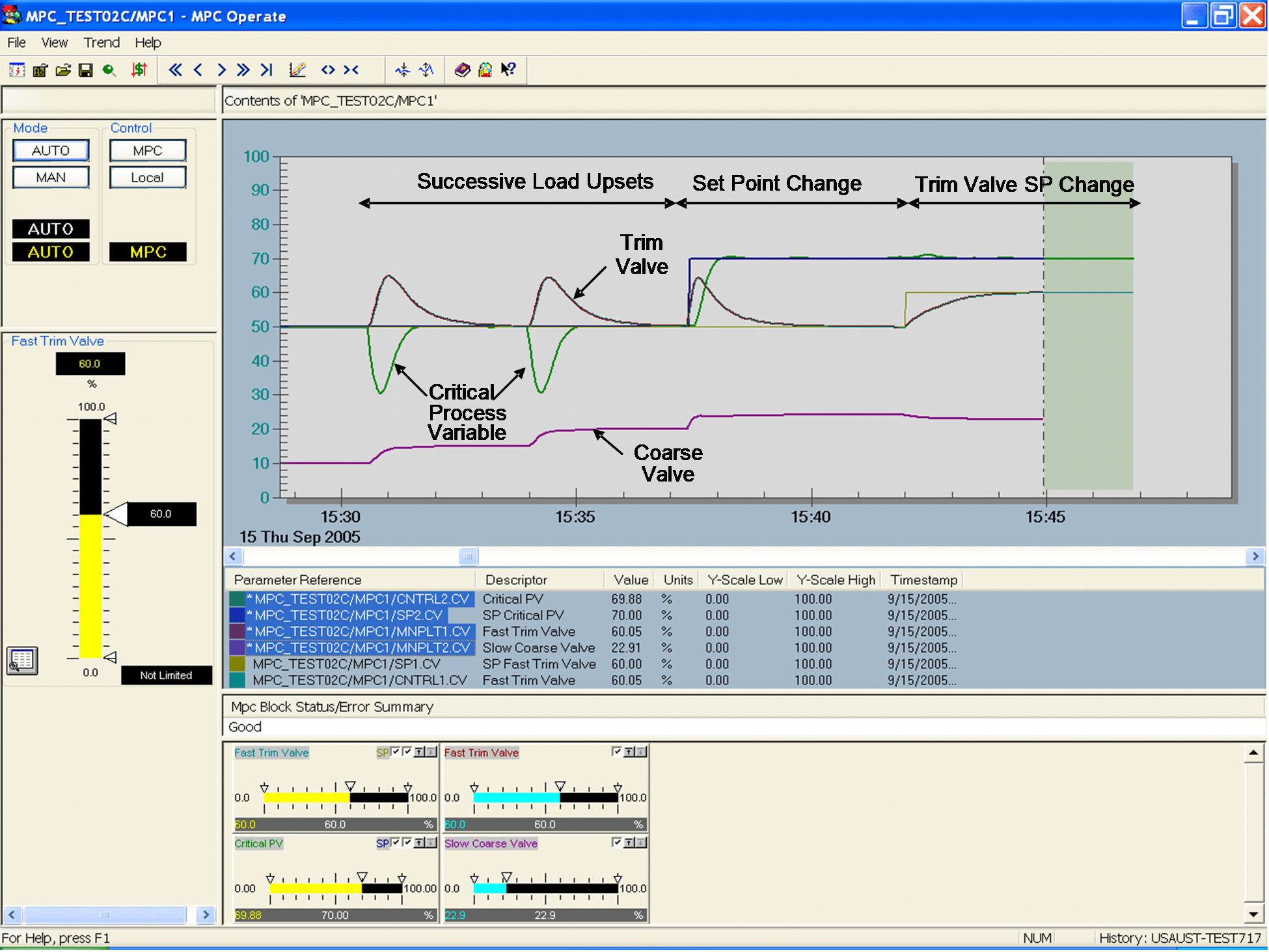
The big valve/little valve example was for pH control where reagent was added to vessel to provide both course and fine control of the reagent flow into the vessel based on the measured discharge pH. Traditional PID control has issues with large process variable disturbances that can saturate the small valve and lead to a loss of control. The control strategy also needs a gap in control to eliminate potential large valve limit cycles.
Using MPC, the tank discharge pH is the controlled variable and the small valve and large valve positions are manipulated variables. Large disturbances in the pH are handled by moving both the large and small valves. Constraint control is applied on the small valve position to eliminate large valve limit cycles.
Look at the presentation to see how MPC effectively addresses the other application examples.
Visit the Control Performance Solutions section on Emerson.com for ways these and other control strategies can be applied to improve the performance of your process. You can also connect and interact with other control experts in the Services group in the Emerson Exchange 365 community.

